Элементы теории вентильного привода
Определение вентильного двигателя
Обозначение в зарубежной литературе
Конструкция
Статор
Ротор
В зависимости от количества магнитов, расположенных в поперечном сечении ротора двигатель будет иметь то или иное количество полюсов.
В погружных вентильных электродвигателях используемых в нефтяной отрасли ротор содержит постоянные магниты. Как правило погружные ВД выпускаются 8-ми и 4-х полюсными.
При одной и той же частоте вращения электромагнитного поля статора, частота вращения вентильного электродвигателя с большим количеством пар полюсов будет меньше. Так, если скорость вращения 8-ми полюсного электродвигателя 1500 об/мин, то 4-х полюсный при той же частоте поля будет вращаться с частотой 3000 об/мин.
Принцип работы
Принцип работы вентильного электродвигателя
Здесь, одно из ключевых отличий вентильного (синхронного) и асинхронного двигателей.
Принцип работы асинхронного электродвигателя
Его ротор представляет собой обмотку с короткозамкнутыми витками , по виду напоминающую беличью клетку прутья которой — стержни с торцов соединенные кольцами.
Вращающееся электромагнитное поле статора наводит в роторе ЭДС, в стержнях ротора начинает течь ток, в результате чего возникает магнитное поле, которое и заставляет вращаться ротор вслед за магнитным полем, создаваемым статором. Именно то, что поле статора движется относительно ротора является условием возникновения электромагнитного поля в роторе. Если ротор заставить вращаться с той же скоростью, что и магнитное поле, создаваемое статором, то ЭДС в роторе наводится не будет! Таким образом скорость вращения ротора асинхронного двигателя всегда меньше скорости вращения поля.
Синхронный же двигатель не требует возбуждения ЭДС ротора от магнитного поля, создаваемого статором, магнитное поле здесь уже присутствует без его участия. Поэтому ротор синхронного электродвигателе вращается строго с частотой поля, создаваемого обмотками статора. Если установить частоту вращения синхронного двигателя равной 3000 об/мин, то это значит, что и магнитное поле двигателя, создаваемого обмотками статора равна 3000 об/мин. Частота вращения асинхронного двигателя в тех же условиях будет 2910 об/мин.
Система управления вентильным электродвигателем
Инвертором в данном случае называют электронную систему, осуществляющую подачу напряжения, частота которого не зависит от частоты питающего напряжения на обмотки электродвигателя.
Инвертором оснащаются не только синхронные (вентильные) электродвигатели, но асинхронные — там где требуется регулирование частоты вращения.
Существуют два основных подхода (принципа) в управлении вентильными электродвигателями:
- 1. Управления коммутацией (6-ти пульсное управление);
- 2. Векторное управление.
Управление коммутацией
И еще раз обратим ваше внимание! Не частота вращения ротора изменяется от частоты вращения поля, а поле подстраивается под частоту вращения ротора. Инвертор регулирует частоту вращения ротора изменяя ток и/или напряжение коммутируемое к обмоткам.
Определение положения ротора
Для определения положения ротора существуют различные методы:
- при помощи датчиков (например датчика Холла);
- бездатчиковый.
В погружных вентильных электродвигателях используется бездатчиковый метод определения положения ротора, т.к. применение датчиков в данном случае невозможно в силу специфики эксплуатации.
В бездатчиковом методе при вращении двигателя определение положение ротора осуществляется по значению ЭДС, наводимой в свободной фазе (к которой в данной момент не подводится питающее напряжение) обмотки статора. При движении ротора ЭДС в свободной фазе меняется и переход ее через 0 является «отметкой» положения ротора.
При таком методе управления в обмотках статора течет ток по форме близкий к трапецеидальному.
Данный способ управления характеризует простота и надежность, что позволяет управлять вентильным электродвигателем не только на коротких расстояниях, но и на длинных линиях — сотни метров и даже километры, что актуально для нефтяного погружного оборудования.
Векторное управление
Метод позволяет очень точно управлять электродвигателем. Метод наиболее ресурсоемкий в плане математических вычислений, однако развитие микропроцессорной техники позволяет компенсировать это. Применение его на коротких линиях очень эффективно, однако использование на длинных линиях ставит перед разработчиками множество преград, решение которых — нетривиальная задача.
Основные технические особенности вентильных двигателей
Для решения задач контролируемого движения в современных прецизионных системах все чаще применяются вентильные (бесколлекторные) двигатели. Такая тенденция обусловлена преимуществами вентильных двигателей и бурным развитием вычислительных возможностей микроэлектроники. Как известно, вентильные (синхронные) двигатели обеспечивают наиболее высокие плотность длительного момента (момент в единице объема) и энергетическую эффективность по сравнению с любым другим типом двигателя.
Современный вентильный привод объединяет электрическую, механическую и электронную подсистемы в единое цельное мехатронное устройство. В рамках такого подхода удается значительно сократить габариты, избавиться от лишних преобразователей и промежуточных элементов, а значит, повысить надежность всего привода в целом.
В рамках данной статьи рассматривается принцип работы и устройство современных вентильных машин, описываются принципы управления вентильным преобразователем для коммутации с применением датчиков положения ротора, а также перечисляются особенности интегрированного исполнения вентильных двигателей.
1. Основные технические особенности вентильных двигателей
Под вентильным двигателем понимают синхронный двигатель, содержащий многофазную обмотку статора, ротор с постоянными магнитами и встроенным датчиком положения. Коммутация такого двигателя осуществляется при помощи вентильного преобразователя. Поэтому его принято называть «вентильным».
По сути, вентильный двигатель с точки зрения метода коммутации представляет собой «инвертированный» вариант коллекторной машины постоянного тока. В вентильном двигателе индуктор находится на роторе, якорная обмотка на статоре. Коммутация осуществляется путем подачи управляющего согласованного воздействия на обмотки статора в зависимости от положения ротора, определяемого с помощью интегрированных в двигатель датчиков обратной связи.

Рис. 1. Структура вентильного двигателя:
1 – задняя крышка, 2 – печатная плата датчиков, 3 – датчики Холла,
4 – втулка подшипника, 5 – подшипник, 6 – вал,
7 – магниты ротора, 8 – изолирующее кольцо, 9 – обмотка,
10 – тарельчатая пружина, 11 – промежуточная втулка, 12 – изоляция,
13 – корпус, 14 – провода.
Рассмотрим структуру вентильного двигателя на примере семейства двигателей Faulhaber (рис. 1). В данном случае в основе ротора лежит двухполюсный магнит, статора трехфазная обмотка, положение ротора определяется с помощью интегрированных в двигатель датчиков Холла. В общем случае ротор может содержать другое количество пар полюсов, а статор иметь более традиционную конструкцию, внешне сходную со статором асинхронной машины. Наиболее распространен статор с тремя обмотками, соединенными «звездой» (реже в «треугольник») без вывода средней точки. Как известно, именно трехфазная структура является наиболее эффективной при минимуме числа обмоток.
При соединении обмоток «звездой» вентильный двигатель имеет большие постоянные момента и меньшие постоянные противоЭДС (при соотношении ?3) по сравнению с соединением «треугольником». Поэтому соединение «звездой» используется для управления осями, требующими больших моментов, а соединение «треугольником» – для больших скоростей.
В большинстве случаев обмотки статора выполняются без насыщения, т.е. противоЭДС обмоток имеет синусоидальную форму. Такие двигатели зачастую называют AC brushless motor в отличие от DC brushless motor, обмотки статора которого выполняются с насыщением. Такое насыщение в DC brushless motor предназначено для снижения пульсаций тока (и соответственно момента) при применении трапецеидальной коммутации.
Но иногда термин DC brushless motor используют для двигателей с питанием через инвертор от сети постоянного тока, что не совсем корректно.
Обычно количество пар полюсов, определяемое количеством пар магнитов ротора и определяющее соотношение механического и электрического оборотов, равно 4…8. Статор может быть выполнен с железным (iron core) или безжелезным (ironless) сердечником. Конструкция статора с безжелезным сердечником обеспечивает отсутствие силы притяжения магнитов ротора и железа статорной обмотки (magnetic attraction) и зубцового эффекта (cogging), но снижает незначительно (на 10…20%) эффективность двигателя изза меньших значений постоянной момента.
Одно из самых очевидных преимуществ ротора с постоянными магнитами состоит в уменьшении диаметра ротора и, как следствие, в уменьшении момента инерции ротора. Технологически магниты могут быть встроены в ротор или расположены на его поверхности. Но пониженный момент инерции зачастую приводит к малым значениям соотношения момента инерции двигателя и приведенного к его валу момента инерции нагрузки (mismatch ratio), усложняющему настройку привода. Поэтому ряд производителей предлагает наряду со стандартным и повышенный – в 2…4 раза – момент инерции ротора.
2. Датчики положения и дополнительные устройства
В качестве датчика положения, необходимого для коммутации вентильного двигателя, могут быть использованы датчики Холла (цифровые или аналоговые), энкодер (цифровой, аналоговый или абсолютный) или резольвер.
Цифровые датчики Холла используются для наиболее распространенной – трапецеидальной коммутации вентильного двигателя. Цифровые датчики Холла могут быть выполнены также и на оптической шкале энкодера.Аналоговые датчики Холла используются для синусоидальной коммутации вентильного двигателя.
Энкодер имеет три дифференциальных канала – два канала А, В прямоугольных импульсов, сдвинутых на 90 электрических градусов, и нулевой импульс I (индекс). Резольвер представляет собой вращающийся трансформатор с обмоткой возбуждения и двумя выходными обмотками со сдвигом 90 электрических градусов.
Аналоговый энкодер имеет аналоговые sin/cos (1В между пиками peaktopeak) дифференциальные выходы.
Внешний интерполятор позволяет повысить исходное разрешение с коэффициентом умножения до 4096 .Абсолютный энкодер передает информацию по положению по синхронному последовательному интерфейсу (SSI или BiSS), протокол которого задается производителем энкодера. Одними из наиболее популярных протоколов являются Heidenhain EnDat, Tamagawa Smart Abs и Stegman Hiperface протоколы.
Кроме датчика положения дополнительно могут быть встроены: тахогенератор, термодатчик, тормоз или редуктор.
Тахогенератор применяется в случае использования вентильного двигателя в режиме регулирования/стабилизации скорости с высокой точностью.
Термодатчик для защиты обмоток от перегрева представляет собой несколько последовательно соединенных позисторов, т.е. терморезисторов с положительным температурным коэффициентом (positive temperature coefficient РТС).
3. Способы коммутации с применением датчика положения ротора
Способы коммутации вентильного двигателя различаются по типу датчика положения ротора и особенностям регулирования тока в фазах обмоток статора.
3.1. Трапецеидальная или шестишаговая (sixstep) коммутация вентильного двигателя осуществляется по цифровым датчикам Холла. Для 3х датчиков Холла, являющихся «грубым» датчиком положения ротора, возможных состояний на полный электрический оборот будет шесть, каждое из которых соответствует 60 электрическим градусам. При каждом постоянном состоянии датчиков Холла подключаются только две обмотки двигателя, а третья отключена от источника напряжения. Постоянство вектора тока в пределах ±30 электрических градусов от оптимального (создающего максимальный момент) приводит к 17% пульсациям тока.
Преимущества:
- готовность к работе при включении питания;
- дешевый усилитель тока;
- управление током (моментом) аналоговым сигналом ±10В.
Недостатки:
- пульсации тока;
- средние показатели быстродействия при позиционировании и равномерности при сканировании.
Область применения: регулирование скорости при невысоких требованиях к эффективности и равномерности перемещения на низких скоростях.
3.2. Синусоидальная коммутация лишена недостатков трапецеидальной коммутации за счет непрерывной и плавной коммутации вектора тока. Это достигается благодаря более высокому разрешению датчика положения ротора (обычно инкрементального энкодера) по сравнению с цифровыми датчиками Холла, имеющими разрешение только 60 электрических градусов. Для стандартного двигателя с соединением фаз в «звезду» достаточно контролировать ток в двух обмотках с помощью двух регуляторов на базе ПИрегуляторов. Такой способ коммутации очень эффективен на малых и средних скоростях, но имеет ошибки на высоких скоростях. В этом случае изза ограниченного усиления ПИрегулятора при заданном напряжении постоянного напряжения (DC bus) мах скорость ограничена. Несколько повысить скорость позволяет метод сдвиг фазы (phase advance).
Преимущества:
- минимальные пульсации тока;
- высокие показатели быстродействия при позиционировании и равномерности при сканировании.
Недостатки:
ограничение мах скорости при заданном напряжении постоянного напряжения;
управление током (моментом/силой) при помощи двух аналоговых сигналов ±10В.
Область применения: прецизионные механизмы.
3.3. Непосредственно векторный контроль тока в координатах DQ использует преобразования между статическими DQ и вращающими UVW координатами вектора тока, известными как преобразования ПаркаКларка. В отличие от синусоидальной такой способ коммутации предполагает работу ПИрегулятора с напряжениями постоянного тока, а не синусоидальными напряжениями. Это и обеспечивает качество управления током, независимое от скорости вращения двигателя.
Векторный контроль предполагает регулирование квадратичной (D) и прямой (Q) составляющих тока. Т.к. только прямая (Q) составляющая тока, перпендикулярная к полю ротора, создает момент двигателя, то задание тока подается на вход прямой (Q) составляющей тока. На вход квадратичной (D) составляющей тока подается «0» сигнал.
Преобразования между статическими DQ и вращающими UVW координатами вектора тока производятся с учетом токов фаз и положения ротора.
Векторный контроль при наличии преимуществ синусоидальной коммутации позволяет расширить диапазон скоростей вентильного двигателя за счет более полного использования напряжения постоянного тока.
Следует отметить, что для синусоидальной или векторной коммутации тока при использовании инкрементального (относительного) датчика положения ротора необходимо первоначально (т.е. при каждом включении питания) сфазировать положение ротора относительно фаз статора. Алгоритм такой начальной фазировки обычно является «встроенным».
Трапецеидальная коммутация вентильного двигателя не требует начальной фазировки благодаря использованию датчиков Холла, являющихся абсолютными датчиками положения ротора. Поэтому их иногда применяют вместе с инкрементальным датчиком положения для реализации синусоидальной или векторной коммутации тока без необходимости производить начальную фазировку. Такая конфигурация рекомендуется для механизмов, где реализация процедуры начальной фазировки затруднена, например, механизмов вертикального перемещения.
4. Интегрированное исполнение вентильных двигателей
Одной из основных перспективных тенденций в развитии современных вентильных двигателей является тяготение производителя к интеграции в единый корпус с двигателем управляющей электроники. Такое решение позволяет предлагать не разрозненный набор комплектующих приводной системы, а законченный привод в сборе. Таким образом решаются возможные проблемы совместимости различных компонент привода, а также проблема различных интерфейсов компонент приводной системы.

Рис. 2 Векторный контроль тока вентильного двигателя
Примером интегрированного привода является серия двигателей BG, предлагаемая компанией Dunkermotoren (рис. 3).
В рамках данной серии двигателей производитель предоставляет возможность заказать одну и ту же модель в различных исполнениях:
- без интегрированной управляющей электроники,
- с интегрированной коммутирующей электроникой (2wire),
- с интегрированным контроллером скорости,
- с интегрированным контроллером движения,
- с интегрированным контроллером движения с сетевыми интерфейсами (CAN, PROFINET).
5. Преимущества использования вентильных двигателей
При разработке нового изделия разработчик часто сталкивается с проблемой выбора двигателя для решения конкретной задачи движения. Когда речь идет о построении привода средней либо малой мощности, как правило, выбор сводится к сборкам на базе коллекторных, вентильных, а также шаговых двигателей.

Рис. 3 Двигатели Dunkermotoren серии BG
К несомненным достоинствам вентильных двигателей следует отнести:
Высокий запасаемый момент:
- Идеальное решение при высоких пиковых нагрузках
- Хорошее ускорение при изменяющихся нагрузках
Высокий диапазон скоростей
Высокую равномерность движения
Высокую точность позиционирования благодаря возможности использования энкодеров и других датчиков обратной связи по скорости/положению.
Двигатели для специальных применений: в среде высокого вакуума, автоклавируемые, погружные с высоким классом IP защиты.
М. Сонных, Л. Ганнель
Статья опубликована в журнале «РИТМ» №10, 2010
Вентильные двигатели принцип работы
Технологии никак не стоят на месте, и совершенствование точного оборудования создает новые приборы. К данным типам относятся электромашины, которые уже заменили старые щетки, вместо них используют бесконтактный вентильный двигатель.
План статьи:
- Что такое вентильный двигатель
- Конструкция
- Проектирование вентильного аппарата борец
- Конструкция двигателя:
- Специфика руководства на беспрестанном токе
- Специфика работоспособности на переменном токе
- Применение вентильного двигателя
- Принцип движения векторного аппарата
- Виды фаз изделия
- Преимущества и недостатки
- Вентильный индукторный привод
- Достоинства вентильного индукторного привода
- Заключение
Вентильный двигатель с неизменным и переменным током, конструкция механизма
Полупроводниковый ключ, разумеется под словом «вентиль», в котором режим труда специально регулируется на ключах с полу приводом.
Вентильный двигатель – (ВД) представляет один из подвидов электронного сердца неизменного электрического потока, простой в конструктивном исполнении, в котором ЩКУ (щеточно-коллекторный узел) заменен полупроводниковым проводником, и управляется измерителем позиции статора. Иногда такой датчик отсутствует, и расположение измеряется с помощью наблюдателей, такой тип называется бездатчиковое применение.
Щеточный прибор уменьшает прочность, увеличивая миг инертности, и формирует радиопомехи или даже взрывоопасность, из-за чего и был создан бесконтактный движок, в котором катушечные обмотки обеспечивают высокую технологичность конструкции устройства. В механизме якорь стоит неподвижно, и стабилизатор является неизменяемым магнитом.
Проектирование вентильного аппарата борец
Диффузионный инструмент содержит три подсистемы:
- Электронную
- Механическую
- Электрическую
Многофазные индукторные центры имеют разные способы применения, имеют сильный частотно-регулируемый инструмент, а к тому же имеют такие качества, как бесконтактность, высокая надежность, экономичность, долго прослужат, не ограниченные сильно значения мощности и напряжения, быстродействие, простота и дешевые в ремонте. К тому же возможно использование агрегата на аккумуляторном шуруповерте, так как с его помощью можно получить большие показатели КПД и качественное исполнение продукта за счет снижения веса.
Конструкция двигателя:
- Ротор – реагирует на влияние электромагнитного поля. Основу составляет магнит, и в нем есть многообразные пары полюсов (2 -8) с их чередованием. Более современные инструкции оснащают его из редкоземельных материалов, которые издают больше магнитной индукции и делают электронный организм компактнее.
- Статор – фазы обмоток, намотанные на катушки и диэлектрическую прокладку. В основном обмотки соединяют структура «звезда» или «треугольник». Наиболее распространенной фазой считается трехфазная структура. «Звезду» чаще применяют для больших мигов изменения направления, а «треугольник» для больших скоростей.
- Датчики положения и термодатчик – определяют положение вращения вала. Он делается по разным способам – например эффект Холла, фотоэлектрический и другие. Меры подсчета делаются без приостановок в определенном положении стартера.
Фотоэлектрический датчик имеет три стационарных приемника. Они поочередно зашторивают и крутятся в ту сторону, что и статор. Код, поступает от них и фиксирует положения аппаратуры стабилизации, которых есть шесть. Устройство переделывает сигналы в импульсы подачи струма, и они уже руководят полупроводниковыми ключами.
Термодатчик в фазном двигателе это тормоз. Тахогенератор используется в случае производства мотора в режиме стабилизации скорости.
- Блок с микропроцессором – формирует импульсы, форму и частоту вращения движителя, сравнивает показания на датчиках потока и обмотки
Агрегаты бывают двух видов: бесконтактные переменного и незаменимого тока. Перепускной движок важно отличать от бесколлекторного (БДПТ), такой как прямоугольник и распределяет поле притяжения в зазоре формы трапеции. Строение БДПТ не сложное, (но в статье она не рассматривается), чем структура клапанного, реализация коммутации не так сложно нежели использования ШИМ, выполняется 120 – 180 градусная коммутация).
В системе ЧПУ (числовое программное управление) механизм вентильной передачи получил широкое применение среди электродвигателей, показатели которого превосходят другие системы приводов.
В заданной структурной схеме регулирования контроллер выполняет:
- Регулировку напряжения преобразователя DC;
- Защиту силовых модулей от перенапряжения в сети питания, или от аварий;
- При разгоне отсечки фазовых токов;
- Стабилизация вращений и авто коммутацию фаз;
- Разгон и торможение ;
- Установление положение движителя под нужным углом;
- Мониторинг питательной системы.
Специфика руководства на беспрестанном токе
Он индуцирует на ферромагнитном стабилизаторе магнитных склонениях. Магнитное сопротивление может создавать крутящийся винт. Вентильные препараты беспрерывного течения главным образом применяют в нефтедобыче, буровых снаряжениях, машинах остывания и химических промышленностях.
Специфика работоспособности на переменном токе
Он используется как векторные или частотно-токовые алгоритмы автоматического руководства устройством с моментом и частотами вращений СДПМ. Действие электропередач зависит от точности располагаемой информации о процессах, которые могут изменяться. Все эти механизмы применяют на электроприводах, мостах и зарубежных фирмах.
По способу действия магнитного поля статора и ротора бывают: синхронные, асинхронные и индукторные инструменты. Регулировка происходит с помощью инвертора – электронная система подачи напряжения, в которой частоты не зависят от напряжения питания на обмотки электромотора. В большей мере инвертором оснащены одновременные приспособления, но собственно бывает и асинхронные – чтобы настраивать частоту вращений.
Есть только два назначений контролей вентильным электромотором:
- Коммутация (шести пульсовое)
- Векторное
Настройка связыванием – это когда поле налаживается под частоту вращения в стабилизаторном щитке. Механизм устанавливает вращение, изменяя потока или провод под воздействием к обмоткам с коммутацией.
Методом векторного контроля легко руководить машиной. Его применение очень эффективное на коротких линиях, но для применения на больших линиях делает назначение агрегата сложнее, и решение такой задачи будет довольно таки усложненное.
Где можно применить движок механической машины
Вентильный агрегат можно применять в большом количестве областей регулировки скорости, вращения работоспособных изделий. Такие одновременные измерители имеют точные позиционирования и могут служить для компьютерных систем, приборов движителя, винчестеров, разного типа кулеров и других электромобилях.
Продолжая, можно задействовать с разными совокупностями робототехнике, спутников и авиа конструкций. Бытовая техника не исключение, автомобильные органы и отраслей медицины тоже приветствуется труд вентильных двигателей. Широкое использование возможно в станках разного класса, горнодобывающих устройствах, на станциях или компрессорных установках и разных СЭП составах.
Можно добавить, что в основном дисковые, тяговые двигатели мощностью от кВт и питания 270в используются для транспорта городских машин. Рулевые регулировки подводных, наземных и летательных аппаратов, моторов-колес и других используют вентильные двигатели. При этом, погружные вентильные электродвигатели семейства новомет часто используются для эффективного использования в нефтяных компаниях.
Принцип движения векторного аппарата
Векторный механизм — система закономерности регулируемого пускателя, в каких есть электронный моторчик переменного направления, как в синхронных машинах, балансировочный преобразователь и устройство руководства с неизменяемыми магнитами. С помощью управления цепи на обмотке сердца коммутируют, зависит от того, в каком положении находится движок. Фазный двигатель похож на мотор не изменчивого тока, в котором якорь вместо коммутатора и находится под полюсами возбуждения. При магнитных движениях датчики улавливают их положение и изменяют пропускную способность реактивных вентильных преобразователей, оно и позволяет вращаться телу.
Для простого понимания можно представить себе компас, где сердце синхронной машины будет магнитной стрелкой, а поле статора как магнитное поле планеты. Без внешней нагрузки стабилизатор всегда сосредоточен на поле статора ( как и в компасе нет таких нагрузок). Покрутив компас — стрелка будет вращаться вслед своей оси направления. Так как и в поле статора создается электромагнитами, с помощью катушки и потоков.
Схемы и принцип изделия таков: статором создается магнитное поле, направляя его в нужную сторону с заданной амплитудой. Так как на рисунке в центре стоит магнит – оборудование запуска движения (стрелка компаса), а сбоку электромагниты – катушки, в которой создается свое поле (вертикальная и горизонтальная рисованные оси). (рис.1). 
Магнитный струм в катушке пропорционален напряжении внутри. Нам нужен поток от статора там, где лежит статор (в центре). Две перпендикулярные катушки складываются по вектору и вместе с ротором образуют общий струм. Суммарное направление тока в статорах создало направление течения статора в одну общую сторону.
Также, от числа фаз двигатели разделяются на виды:
- Однофазные – самый простой механизм, в котором задействуются минимум линий передачи напряжения к обмоткам от регулирования. Но, орудие в некоторых событиях имеет усложнение запуска из-за нагрузки
- Двухфазовые – имеют очень хорошую связь между статором и обмоткой. Могут привести к плохим последствиям в продуктивности из-за довольно сильных пульсаций
- Трехфазные – самый распространенный вариант, плавно запускаются, и электродный преобразователь пашет в нормальном режиме. Четные количество обмоток и довольно неплохие тяговые возможности. Из недостатков можно выделить только шум.
- Четырехфазные – отличаются малыми пульсациями и пусковым моментным движением. Также из минусов, большая стоимость, поэтому редко используются.
Двигатели серии 5ДВМ качалок – наличие трехфазных синхронных агрегатов с фланцевым укреплением и возбуждением от редкоземельных магнитов. Предназначены для дела в составе настройки с высокими динамическими характеристиками с широким диапазоном регулировки скоростей. Также используются в станках с математических расчетных контролях, в производствах технологических линий и другие.
Преимущества вентильных электродвигателей
По сравнению с другими электродвигателями регулировочный модуль имеет ряд преимуществ, которые улучшают его характеристики на фоне старых подвидов
- В двигателе нет узлов и не нужно обслуживания оборудования;
- Бесконтактность. Безопасное вращение с минимум нагрузкой;
- Высокий ресурс. Большая перегрузочная возможность и большой пусковой миг;
- Быстродействие и большой радиус вращения;
- Лучше показатели по КПД чем у асинхронных двигателях;
- Минимальные пусковые токи и быстро окупается;
- Долгий срок эксплуатации из-за отсутствия скользящего контакта;
- Можно использовать во взрывоопасной среде.
Каковы недостатки для двигателей неизменного тока большие?
- Присутствие щеточно-коллекторного узла;
- Малая надежность коллекторного инструмента;
- Воздействие на якоре сжато, из-за чего и мощность будет не велика;
- Перегрузочная вместимость основного инструмента неизменного напряжения, как и время действия со сменой тока в якоре – ограничены;
- Большая стоимость за оборудование и сложность в механизации.
Технические характеристики вентильного двигателя
- Небольшая нагрузка– определяет содержание, оно направляется на напорный аппарат для обретения усилия;
- Энергопотребление – сердце показывает количество силы, взятое на применение движка;
- КПД – пропорция дела, сделанный клапанным аппаратом и использованной силы;
- Валовая сила – полезная способность движка, за счет силы притяжения;
- Обычная частота – состав оборотов в минуту, с помощью которых инструмент совершает в номинальном режиме работы;
- Диапазон регулирования частот – предельность изменения частоты оборотов вала для какой-то модели;
- Нормальный крутящий момент – определения попытки, создается на вентильном валу при стандартных параметрах изделия и может регламентироваться пусковыми и минимальными скоростями;
- Коэффициент нагрузки – представляет насколько может снизиться эффективность электрического коллектора над уровнем моря;
- Размеры и вес нужного оборудования.
Характеристика российского электродвигателя на индуктивном механизме
Вентильный индукторный привод – отечественный ВИП, возможно один из самых старых советских электронных движков. В конструкции тоже имеется магнитная система, с сильно выраженной зубчатостью различного количества на статоре и движителе. Последовательное переключение фаз помогает повернуть стартер в нужном направлении. Также, мотор представляется как индуктивная машина с самовозбуждением (изменчивый поток в статоре), потому что магнитное поле создается катушками статорных полюсов и получает питание.
Достоинствами такого агрегата считают довольно простую, надежную и дешевую конструкцию двигателя, которую и используют в сельском хозяйстве, потому что в нем отсутствует сложные технологии в использовании. ВИП по многозадачным показателям превосходит частотно-регулируемый асинхронной передачи. В России развитие такого индуктивного электроприбора было начато профессором Н.Ф. Ильинского в 1995 г., под руководством которого в МЭИ проводились систематические исследования и разработки традиционных ВИП, соответствующих мировому опыту (SRD) и системе проектирования Эссона.
Преимущества вентильного индукторного прибора:
- Надежность изделий (бесконтактность);
- Простота в использовании;
- Адаптация к наиболее современным методам руководств – можно создать векторную систему руководства с поддержкой электромагнитного движения и скорости;
- Высокие показатели КПД более 98%;
- Регулировка скорости вверх в 5 раз за счет дополнительного контроля возбуждением;
- Формировка нужных характеристик двигателя;
- Изменение программного обеспечения под себя;
- Наращивание мощности увеличением секций и использование стандартных модулей;
- Переход питания с 10кВ на 0,4 кВ, позволяет разместить силовые шкафы на минимум удалении от приспособлений.
Заключение: Вообще говоря, в стандартном виде понимания электроизмерительный не полностью электрический инструмент, так как для подтверждения электронного двигателя нужно придавать значению ряду вопросов соответствующих нашей теме теории и схем автоматического контролирования. Сотрудники компании ЧЭАЗ помогут интересующейся особе разрешить любые проблемы связанные с данной темой. Агрегатные машины, в складе которых также есть одинарный и переменный ток, служат альтернативой таким двигателям. Причиной, как и написано в статье, в ассортименте с постоянным течением есть ряд проблем, связанных со ЩКУ, помехи, износ инструмента и плохие проводниковые якоря. Поэтому и применение вентильных двигателей лучше использовать вместо старых со щетками, и механизм можно использовать в затрудненных местах или где ДПТ вообще нельзя использовать.
Вентильный двигатель
Машины постоянного тока, как правило, имеют более высокие технико-экономические показатели (линейность характеристик, высокий КПД, малые габариты и пр.), чем машины переменного тока. Существенный недостаток — наличие щеточного аппарата, который снижает надежность, увеличивает момент инерции, создает радиопомехи, взрывоопасность и т.д. Поэтому, естественно, актуальна задача создания бесконтактного (бесколлекторного) двигателя постоянного тока.
Решение этой задачи оказалось возможным с появлением полупроводниковых приборов. В бесконтактном двигателе постоянного тока, именуемом вентильным двигателем постоянного тока , щеточный аппарат заменен полупроводниковым коммутатором, якорь неподвижен, ротор представляет собой постоянный магнит.
Принцип работы вентильного двигателя
 Под вентильным двигателем понимают систему регулируемого электропривода, состоящую из электродвигателя переменного тока, конструктивно подобного синхронной машине, вентильного преобразователя и устройств управления, обеспечивающих коммутацию цепей обмоток электродвигателя в зависимости от положения ротора двигателя. В этом смысле вентильный двигатель подобен двигателю постоянного тока, в котором посредством коллекторного коммутатора подключается тот виток обмотки якоря, который находится под полюсами возбуждения.
Под вентильным двигателем понимают систему регулируемого электропривода, состоящую из электродвигателя переменного тока, конструктивно подобного синхронной машине, вентильного преобразователя и устройств управления, обеспечивающих коммутацию цепей обмоток электродвигателя в зависимости от положения ротора двигателя. В этом смысле вентильный двигатель подобен двигателю постоянного тока, в котором посредством коллекторного коммутатора подключается тот виток обмотки якоря, который находится под полюсами возбуждения.
Вентильный двигатель постоянного тока представляет собой сложное электромеханическое устройство, в котором сочетаются простейшая электрическая машина и электронная система управления.
Двигателям постоянного тока присущи серьезные недостатки, обусловленные, главным образом, наличием щеточно-коллекторного аппарата:
1. Недостаточная надежность коллекторного аппарата, необходимость его периодического обслуживания.
2. Ограниченные величины напряжения на якоре и, следовательно, мощности двигателей постоянного тока, что ограничивает их применение для высокоскоростных приводов большой мощности.
3. Ограниченная перегрузочная способность двигателей постоянного тока, ограничение темпа изменения тока якоря, что существенно для высокодинамичных электроприводов.
В вентильном двигателе указанные недостатки не проявляются, поскольку здесь щеточно-коллекторный коммутатор заменен бесконтактным коммутатором, выполненным на тиристорах (для приводов большой мощности) или на транзисторах (для приводов мощностью до 200кВт). Исходя из этого, вентильный двигатель, который конструктивно выполняется на базе синхронной машины, часто называют бесконтактным двигателем постоянного тока.
По управляемости вентильный двигатель также подобен двигателю постоянного тока – его скорость регулируется изменением величины подводимого постоянного напряжения. Благодаря своим хорошим регулировочным качествам вентильные двигатели получили широкое применение для привода различных роботов, металлорежущих станков, промышленных машин и механизмов.
Электропривод по системе транзисторный коммутатор-вентильный двигатель с постоянными магнитами
Вентильный двигатель рассматриваемого типа выполнен на базе трехфазной синхронной машины с постоянными магнитами на роторе. Трехфазные обмотки статора питаются постоянным током, подаваемым поочередно в две последовательно соединенные фазные обмотки. Переключение обмоток производится транзисторным коммутатором, выполненным по трехфазной мостовой схеме. Транзисторные ключи открываются и закрываются в зависимости от положения ротора двигателя. Схема вентильного двигателя представлена на рис.1.
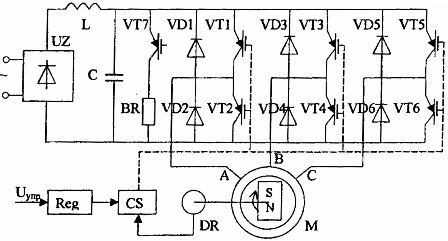
Рис.1. Схема вентильного двигателя с транзисторным коммутатором
Момент, создаваемый двигателем, определяется взаимодействием двух потоков:
• статора, создаваемого током в обмотках статора,
• ротора, создаваемого высокоэнергетическими постоянными магнитами (на основе сплавов самарий-кобальт и других).
где: θ – пространственный угол между векторами потоков статора и ротора; рп – число пар полюсов.
Магнитный поток статора стремится повернуть ротор с постоянными магнитами, так, чтобы поток ротора совпал по направлению с потоком статора (вспомним магнитную стрелку, компаса).
Наибольший момент, создаваемый на валу ротора, будет при угле между векторами потоков равным π/2 и будет уменьшаться до нуля по мере сближения векторов потоков. Эта зависимость показана на рис.2.
Рассмотрим пространственную диаграмму векторов потоков, соответствующую двигательному режиму (при числе пар полюсов pn=1). Предположим, что в данный момент включены транзисторы VT3 и VT2, (см. схему рис.1). Тогда ток проходит через обмотку фазы В и в обратном направлении через обмотку фазы А. Результирующий вектор м.д.с. статора будет занимать в пространстве положение F3 (см.рис.3).
Если ротор занимает в этот момент положение, показанное на рис.4., то двигатель будет развивать в соответствии с 1 максимальный момент, под действием которого ротор будет поворачиваться по часовой стрелке. По мере уменьшения угла θ момент будет уменьшаться. Когда ротор повернется на 30° необходимо в соответствии с графиком на рис.2. переключить ток в фазах двигателя, так, чтобы результирующий вектор м.д.с. статора занял положение F4 (см. рис.3). Для этого нужно отключить транзистор VT3 и включить транзистор VT5.
Переключение фаз выполняет транзисторный коммутатор VT1-VT6, управляемый от датчика положения ротора DR; при этом угол θ поддерживается в пределах 90°±30°, что соответствует максимальному значению момента с наименьшими пульсациями. При рn=1 за один оборот ротора должно быть произведено шесть переключений, благодаря которым м.д.с. статора совершит полный оборот (см. рис.3). При числе пар полюсов больше единицы поворот вектора м.д.с. статора, а, следовательно, и ротора, составит 360/рn градусов.
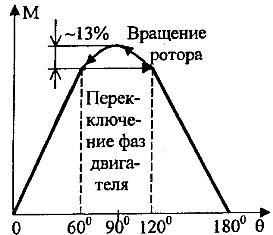
Рис.2. Зависимость момента двигателя от угла между векторами потоков статора и ротора (при рn=1)
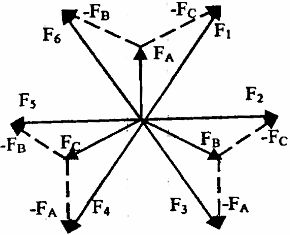
Рис.3. Пространственная диаграмма м.д.с. статора при переключении фаз вентильного двигателя
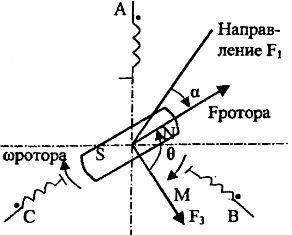
Рис.4. Пространственная диаграмма потоков в двигательном режиме
Регулирование величины момента производится изменением величины м.д.с. статора, т.е. изменением средней величины тока в обмотках статора

где: R1 – сопротивление обмотки статора.
Поскольку поток двигателя постоянен, то э.д.с. Ея, наводимая в двух последовательно включенных обмотках статора будет пропорциональна скорости ротора. Уравнение электрического равновесия для цепей статора будет

При отключении ключей ток в обмотках статора мгновенно не исчезает, а замыкается через обратные диоды и фильтровый конденсатор С.
Следовательно, регулируя напряжение питания двигателя U1, можно регулировать величину тока статора и момента двигателя

Нетрудно заметить, что полученные выражения подобны аналогичным выражениям для двигателя постоянного тока, вследствие чего механические характеристики вентильного двигателя в данной схеме подобны характеристикам двигателя постоянного тока независимого возбуждения при Ф=const.
Изменение напряжения питания вентильного двигателя в рассматриваемой схеме производится методом широтно-импульсного регулирования. Изменяя скважность импульсов транзисторов VT1-VT6 в периоды их включенного состояния, можно регулировать среднюю величину напряжения, подаваемого на обмотки статора двигателя.
Для осуществления режима торможения алгоритм работы транзисторного коммутатора должен быть изменен таким образом, чтобы вектор м.д.с. статора отставал от вектора потока ротора. Тогда момент двигателя станет отрицательным. Поскольку на входе преобразователя установлен неуправляемый выпрямитель, то рекуперация энергии торможения в данной схеме невозможна.
При торможении происходит подзаряд конденсатора фильтра С. Ограничение напряжения на конденсаторах осуществляется путем подключения разрядного сопротивления через транзистор VT7. Таким образом, энергия торможения рассеивается в разрядном сопротивлении.
Если Вам понравилась эта статья, поделитесь ссылкой на неё в социальных сетях. Это сильно поможет развитию нашего сайта!
Подписывайтесь на наш канал в Telegram!
Просто пройдите по ссылке и подключитесь к каналу.
Не пропустите обновления, подпишитесь на наши соцсети:
Вентильные двигатели принцип работы
Вентильный электродвигатель
Нгуен Конг Там,
Динь Куок Выонг,
Ле Тхай Бинь,
студенты Санкт-Петербургского государственного морского технического университета .
Вентильный электродвигатель — это синхронный двигатель, основанный на принципе частотного регулирования с самосинхронизацией, суть которого заключается в управлении вектором магнитного поля статора в зависимости от положения ротора. Вентильные двигатели (в англоязычной литературе BLDC или PMSM) ещё называют бесколлекторными двигателями постоянного тока, потому что контроллер такого двигателя обычно питается от постоянного напряжения.
Этот тип двигателя создан с целью улучшения свойств электродвигателей постоянного тока. Высокие требования к исполнительным механизмам (в частности, высокооборотных микроприводов точного позиционирования) обусловили применение специфических двигателей постоянного тока: бесколлекторных трехфазных двигателей постоянного тока (БДПТ или BLDC). Конструктивно они напоминают синхронные двигатели переменного тока: магнитный ротор вращается в шихтованом статоре с трехфазными обмотками. Но обороты являются функцией от нагрузки и напряжения на статоре. Эта функция реализована с помощью переключения обмоток статора в зависимости от координат ротора. БДПТ существуют в исполнении с отдельными датчиками на роторе и без отдельных датчиков. В качестве отдельных датчиков применяются датчики Холла. Если выполнение без отдельных датчиков, то в качестве фиксирующего элемента выступают обмотки статора. При вращении магнита, ротор наводит в обмотках статора ЭДС, в результате чего возникает ток. При выключении одной обмотки измеряется и обрабатывается сигнал, который был в ней наведен. Этот алгоритм требует процессор обработки сигналов. Для торможения и реверса БДПС не нужна мостовая схема реверса питания – достаточно подавать управляющие импульсы на обмотки статора в обратной последовательности.
В вентильном двигателе (ВД) индуктор находится на роторе (в виде постоянных магнитов), якорная обмотка находится на статоре (синхронный двигатель). Напряжение питания обмоток двигателя формируется в зависимости от положения ротора. Если в двигателях постоянного тока для этой цели использовался коллектор, то в вентильном двигателе его функцию выполняет полупроводниковый коммутатор (датчик положения ротора (ДПР) с инвертором).
Основным отличием ВД от синхронного двигателя является его самосинхронизация с помощью ДПР, в результате чего у ВД частота вращения поля пропорциональна частоте вращения ротора.
Информационное агентство. Онлайн терминал финансовой информации.
новые запчасти для авто BMW. Доставка

Рис. 1. Вентильный электродвигатель с постоянными магнитами на роторе.
Статор имеет традиционную конструкцию и похож на статор асинхронной машины. Он состоит из корпуса, сердечника из электротехнической стали и медной обмотки, уложенной в пазы по периметру сердечника. Количество обмоток определяет количество фаз двигателя. Для самозапуска и вращения достаточно двух фаз — синусной и косинусной. Обычно ВД трёхфазные, реже – четырёхфазные.
По способу укладки витков в обмотки статора различают двигатели имеющие обратную электродвижущую силу трапецеидальной (BLDC) и синусоидальной (PMSM) формы. По способу питания фазный электрический ток в соответствующих типах двигателя также изменяется трапецеидально или синусоидально.
Ротор изготавливается с использованием постоянных магнитов и имеет обычно от двух до восьми пар полюсов с чередованием северного и южного полюсов.
Вначале для изготовления ротора использовались ферритовые магниты. Они распространены и дёшевы, но им присущ недостаток в виде низкого уровня магнитной индукции. Сейчас получают популярность магниты из сплавов редкоземельных элементов, так как они позволяют получить высокий уровень магнитной индукции и уменьшить размер ротора.
Датчик положения ротора
Датчик положения ротора (ДПР) реализует обратную связь по положению ротора. Его работа может быть основана на разных принципах — фотоэлектрический, индуктивный, на эффекте Холла, и т. д. Наибольшую популярность приобрели датчики Холла и фотоэлектрические, так как они практически безынерционны и позволяют избавиться от запаздывания в канале обратной связи по положению ротора.
Фотоэлектрический датчик, в классическом виде, содержит три неподвижных фотоприёмника, которые поочерёдно закрываются шторкой вращающейся синхронно с ротором. Это показано на рисунке. Двоичный код, получаемый с ДПР, фиксирует шесть различных положений ротора. Сигналы датчиков преобразуются управляющим устройством в комбинацию управляющих напряжений, которые управляют силовыми ключами, так, что в каждый такт (фазу) работы двигателя включены два ключа и к сети подключены последовательно две из трёх обмоток якоря. Обмотки якоря U, V, W расположены на статоре со сдвигом на 120° и их начала и концы соединены так, что при переключении ключей создаётся вращающееся магнитное поле.
Принцип работы ВД
Принцип работы ВД основан на том, что контроллер ВД коммутирует обмотки статора так, чтобы вектор магнитного поля статора всегда был ортогонален вектору магнитного поля ротора. С помощью широтно-импульсной модуляции (ШИМ) контроллер управляет током, протекающим через обмотки ВД, т.е. вектором магнитного поля статора, и таким образом регулируется момент, действующий на ротор ВД. Знак у угла между векторами определяет направление момента действующего на ротор.
Градусы при расчете – электрические. Они меньше геометрических градусов в число пар полюсов ротора. Например, в ВД с ротором имеющим 3 пары полюсов оптимальный угол между векторами будет 90°/3 = 30°
Коммутация производится так, что поток возбуждения ротора — Ф поддерживается постоянным относительно потока якоря. В результате взаимодействия потока якоря и возбуждения создаётся вращающий момент M, который стремится развернуть ротор так, чтобы потоки якоря и возбуждения совпали, но при повороте ротора под действием ДПР происходит переключение обмоток и поток якоря поворачивается на следующий шаг.
В этом случае и результирующий вектор тока будет сдвинут и неподвижен относительно потока ротора, что и создаёт момент на валу двигателя.
В двигательном режиме работы МДС статора опережает МДС ротора на угол 90°, который поддерживается с помощью ДПР. В тормозном режиме МДС статора отстаёт от МДС ротора, угол 90° так же поддерживается с помощью ДПР.
Достоинства и недостатки ВД
– высокое быстродействие и динамика, точность позиционирования;
– широкий диапазон изменения частоты вращения;
– бесконтактность и отсутствие узлов, требующих техобслуживания — бесколлекторная машина;
– возможность использования во взрывоопасной и агрессивной среде;
– большая перегрузочная способность по моменту;
– высокие энергетические показатели (КПД более 90 % и cosφ более 0,95);
– большой срок службы, высокая надёжность и повышенный ресурс работы за счёт отсутствия скользящих электрических контактов;
– низкий перегрев электродвигателя, при работе в режимах с возможными перегрузками.
– относительно сложная система управления двигателем;
– необходимо полупроводниковое устройство, управление более сложное и дорогое, чем у других типов электродвигателей.
1. И.О. Овчинников. Вентильные электрические двигатели и привод на их основе.
Вентильный электродвигатель
Вентильный электродвигатель — это синхронный двигатель, основанный на принципе частотного регулирования с самосинхронизацией, суть которого заключается в управлении вектором магнитного поля статора в зависимости от положения ротора. Вентильные двигатели (в англоязычной литературе BLDC или PMSM) ещё называют бесколлекторными двигателями постоянного тока, потому что контроллер такого двигателя обычно питается от постоянного напряжения.
Содержание
Описание ВД
Этот тип двигателя создан с целью улучшения свойств электродвигателей постоянного тока.
В вентильном двигателе (ВД) индуктор находится на роторе (в виде постоянных магнитов), якорная обмотка находится на статоре (синхронный двигатель). Напряжение питания обмоток двигателя формируется в зависимости от положения ротора. Если в двигателях постоянного тока для этой цели использовался коллектор, то в вентильном двигателе его функцию выполняет полупроводниковый коммутатор (датчиком положения ротора (ДПР) с инвертором).
Основным отличием ВД от синхронного двигателя является его самосинхронизация с помощью ДПР, в результате чего у ВД, частота вращения поля пропорциональна частоте вращения ротора.
Статор

Статор имеет традиционную конструкцию и похож на статор асинхронной машины. Он состоит из корпуса, сердечника из электротехнической стали и медной обмотки,уложенной в пазы по периметру сердечника. Количество обмоток определяет количество фаз двигателя. Для самозапуска и вращения достаточно двух фаз — синусной и косинусной. Обычно ВД трёхфазные, реже- четырёхфазные.
По способу укладки витков в обмотки статора различают двигатели имеющие обратную электродвижущую силу трапецеидальной (BLDC) и синусоидальной (PMSM) формы. По способу питания фазный электрический ток в соответствующих типах двигателя также изменяется трапецеидально или синусоидально.
Ротор
Ротор изготавливается с использованием постоянных магнитов и имеет обычно от двух до восьми пар полюсов с чередованием северного и южного полюсов.
Вначале для изготовления ротора использовались ферритовые магниты. Они распространены и дёшевы, но им присущ недостаток в виде низкого уровня магнитной индукции. Сейчас получают популярность магниты из редкоземельных сплавов, так как они позволяют получить высокий уровень магнитной индукции и уменьшить размер ротора.
В двигателях большой мощности вместо постоянного магнита на роторе используется электромагнит. Напряжение питания к нему подаётся через щётки и контактные кольца установленные на роторе. Так устроен автомобильный генератор.
Датчик положения ротора
Датчик положения ротора (ДПР) реализует обратную связь по положению ротора. Его работа может быть основана на разных принципах — фотоэлектрический, индуктивный, на эффекте Холла, и т. д. Наибольшую популярность приобрели датчики Холла и фотоэлектрические, так как они практически безинерционны и позволяют избавиться от запаздывания в канале обратной связи по положению ротора.
Фотоэлектрический датчик, в классическом виде, содержит три неподвижных фотоприёмника, которые поочерёдно закрываются шторкой вращающейся синхронно с ротором. Это показано на рисунке. Двоичный код, получаемый с ДПР, фиксирует шесть различных положений ротора. Сигналы датчиков преобразуются управляющим устройством в комбинацию управляющих напряжений, которые управляют силовыми ключами, так, что в каждый такт (фазу) работы двигателя включены два ключа и к сети подключены последовательно две из трёх обмоток якоря. Обмотки якоря U, V, W расположены на статоре со сдвигом на 120° и их начала и концы соединены так, что при переключении ключей создаётся вращающееся магнитное поле.
Система управления ВД
Система управления содержит силовые ключи, часто тиристоры или силовые транзисторы с изолированным затвором. Из них собирается инвертор напряжения или инвертор тока. Система управления ключами обычно реализуется на основе использования микроконтроллера. Наличия микропроцессора требует большое количество вычислительных операций по управлению двигателем.
Принцип работы ВД
Принцип работы ВД, основан на том что контроллер ВД так коммутирует обмотки статора чтобы вектор магнитного поля статора всегда был сдвинут на угол близкий к 90° или −90° относительно вектора магнитного поля ротора. C помощью ШИМ модуляции контроллер управляет током протекающим через обмотки ВД и значит величиной вектора магнитного поля статора и таким образом регулируется момент действующий на ротор ВД. Знак у угла между векторами определяет направление момента действующего на ротор.
Внимание ! Градусы ЭЛЕКТРИЧЕСКИЕ. Они меньше геометрических градусов в число пар полюсов ротора. Например в ВД с ротором имеющим 3 пары полюсов оптимальный угол между векторами будет 90°/3 = 30°
Так как фаз коммутации обмоток всего 6 то вектор статора может перемещаться скачками по 60° — значит реальный угол между векторами будет не 90°, а будет меняться от 60° до 120° при вращении ротора ВД.
Коммутация производится так, что поток возбуждения ротора — Ф поддерживается постоянным относительно потока якоря. В результате взаимодействия потока якоря и возбуждения создаётся вращающий момент M, который стремится развернуть ротор так, чтобы потоки якоря и возбуждения совпали, но при повороте ротора под действием ДПР происходит переключение обмоток и поток якоря поворачивается на следующий шаг.
В этом случае и результирующий вектор тока будет сдвинут и неподвижен относительно потока ротора, что и создаёт момент на валу двигателя.
В двигательном режиме работы МДС статора опережает МДС ротора на угол 90°, который поддерживается с помощью ДПР. В тормозном режиме МДС статора отстаёт от МДС ротора, угол 90° так же поддерживается с помощью ДПР.
Управление двигателем
Контроллер ВД регулирует момент действующий на ротор меняя величину ШИМ.
В отличие от щёточного электродвигателя постоянного тока, коммутация в ВД осуществляется и контролируется с помощью электроники.
Распространены системы управления, реализующие алгоритмы широтно-импульсного регулирования и широтно-импульсной модуляции при управлении ВД.
Система, обеспечивающая самый широкий диапазон регулирования скорости — у двигателей с векторным управлением. С помощью преобразователя частоты осуществляется регулирование скорости двигателя и поддержание потокосцепления в машине на заданном уровне.
Особенность регулирования электропривода с векторным управлением — контролируемые координаты, измеренные в неподвижной системе координат преобразуются к вращающейся системе, из них выделяется постоянное значение, пропорциональное составляющим векторов контролируемых параметров, по которым осуществляется формирование управляющих воздействий, далее обратный переход.
Недостатком этих систем является сложность управляющих и функциональных устройств для широкого диапазона регулирования скорости.
Достоинства и недостатки ВД
В последнее время, этот тип двигателей быстро приобретает популярность, проникая во многие отрасли промышленности. Находит применение в различных сферах использования: от бытовых приборов до рельсового транспорта.
ВД с электронными системами управления часто объединяют в себе лучшие качества бесконтактных двигателей и двигателей постоянного тока.
- Высокое быстродействие и динамика, точность позиционирования
- Широкий диапазон изменения частоты вращения
- Бесконтактность и отсутствие узлов, требующих техобслуживания — бесколлекторная машина
- Возможность использования во взрывоопасной и агрессивной среде
- Большая перегрузочная способность по моменту
- Высокие энергетические показатели (КПД более 90 % и соsφ более 0,95)
- Большой срок службы, высокая надёжность и повышенный ресурс работы за счёт отсутствия скользящих электрических контактов
- Низкий перегрев электродвигателя, при работе в режимах с возможными перегрузками
- Относительно сложная система управления двигателем
- Высокая стоимость двигателя, обусловленная использованием дорогостоящих постоянных магнитов в конструкции ротора
Вентильные двигатели. Виды и устройство. Работа и применение
Электродвигатели, работающие от постоянного тока, обычно обладают более высокими экономическими и техническими характеристиками, по сравнению с двигателями переменного тока. Единственным серьезным недостатком является наличие щеточного механизма, существенно понижающего надежность всей конструкции, повышающего инерционность ротора, взрывоопасность двигателя, а также создает радиопомехи.
Поэтому были созданы бесконтактные двигатели, работающие от постоянного тока, которые получили название вентильные двигатели. Создание такого нового устройства стало возможным, благодаря появлению полупроводников. Щеточный механизм в этой конструкции заменен коммутатором на основе полупроводниковых элементов. Якорь является неподвижным элементом, а на роторе закреплены постоянные магниты.
Устройство и работа
В целом вентильные двигатели включают в себя три подсистемы:
- Электронную.
- Механическую.
- Электрическую.
В результате получается мехатронное устройство, которое позволяет сделать корпус более компактным, избавиться от дополнительных деталей, лишних преобразователей, а соответственно сделать весь привод механизма более надежным.
Вентильный электродвигатель представляет собой измененный вариант коллекторного мотора постоянного тока. Мотор имеет индуктор, расположенный на роторе, обмотка якоря находится на статоре. Электричество подается управляющими командами на статорные обмотки, в зависимости от угла поворота ротора, который определяется встроенными датчиками Холла.

Ротор
Основу этого элемента составляет многополюсный постоянный магнит, который может иметь разное количество пар полюсов (от 2 до 8), с чередованием полюсов. Поначалу для производства роторов применяли ферритовые магниты невысокой стоимости. Однако ферритовые магниты имеют недостаток в том, что у них низкое значение магнитной индукции.
Современные конструкции роторов оснащают магнитами, изготовленными из редкоземельных элементов. Они дают возможность получить большую магнитную индукцию, а также сделать ротор более компактным.
Статор
Вентильный электродвигатель обычно имеет статор, состоящий из 3-х обмоток, соединенных «звездой» без отвода от средней точки, и внешне похожий на статор асинхронного мотора. Существуют вентильные двигатели со статором с большим количеством обмоток, а кроме схемы «звезды» их могут соединять «треугольником». Трехфазная структура обмоток считается наиболее эффективной при наименьшем количестве обмоток.
Если сравнивать две рассмотренные схемы соединения, то схема «звезды» предполагает больший момент вращения и меньшие показатели противо-ЭДС, в отличие от схемы «треугольника». Поэтому «звезду» чаще всего применяют для получения больших крутящих моментов, а «треугольник» — больших скоростей вращения.
Датчики положения и термодатчик
Этот чувствительный элемент создает обратную связь, и определяет положение ротора. Такие датчики могут работать по разным принципам – эффекта Холла, фотоэлектрическому и т.д. Большое распространение получили фотоэлектрические и датчики Холла. Они не имеют инерционности и дают возможность работы без запаздывания при определении положения ротора.
Фотоэлектрический датчик в его стандартном виде имеет три стационарных фотоприемника. Они по очереди закрываются шторкой, которая крутится синхронно ротору. Двоичный код, поступающий от датчиков, фиксирует шесть разных положений ротора. Управляющее устройство преобразует сигналы датчиков в управляющие импульсы напряжений, которые в свою очередь управляют полупроводниковыми ключами.
В каждый рабочий такт мотора включены два силовых ключа, и к электроэнергии подключены две обмотки из трех. Якорные обмотки расположены со сдвигом 120 градусов, и соединены между собой так, что при управлении силовыми ключами образуется вращающееся магнитное поле.
Дополнительно в вентильном двигателе могут иметься термодатчик, тормозной механизм. Тахогенератор используется в случае работы мотора в режиме стабилизации скорости с большой точностью.
Термодатчик служит для предохранения обмоток от перегрева, и включает в себя несколько позисторов, соединенных друг с другом между собой последовательно. Позисторы – резисторы, сопротивление которых зависит от температуры, чем больше температура, тем выше их сопротивление.
Принцип действия
Контроллер вентильного двигателя подключает обмотки статора так, что направление магнитного поля статора всегда перпендикулярно направлению поля ротора. Благодаря широтно-импульсной модуляции контроллер управляет током, который проходит по обмоткам. В результате создается момент вращения ротора, который регулируется.
Виды
Вентильные двигатели бывают постоянного и переменного тока. Кроме того, их разделяют на виды по числу фаз:
- Однофазные . Это наиболее простая конструкция вентильных двигателей с минимальным числом связей между электронной системой и мотором. К недостаткам однофазных двигателей относятся большие пульсации, невозможность пуска при некоторых положениях ротора. Однофазные моторы широко используются в механизмах, где необходима высокая скорость работы.
- Двухфазные . Такие вентильные двигатели работают в механизмах, где обязательно наличие связи обмотки и статора. К недостаткам можно отнести большой момент вращения и сильные пульсации, способные привести к отрицательным последствиям.
- Трехфазные . Эта дисковая конструкция мотора применяется для создания момента вращения, не применяя для этого большое число фаз. Этот вид моторов используется во многих отраслях промышленности, а также в бытовых условиях. Это наиболее распространенная конструкция, по сравнению с другими. Трехфазные двигатели вентильного типа, имеющие четное количество полюсов, стали хорошим вариантом для устройств, где требуется сочетание небольшой скорости и высокой мощности. Недостатками 3-фазных вентильных моторов является высокий уровень шума.
- 4-фазные . У таких двигателей значительно уменьшен момент вращения и пульсаций. Используются они достаточно редко, так как они имеют высокую стоимость.
Вентильные двигатели применяются во многих областях производства, например, на буровых установках, в системах охлаждения на химических заводах, на нефтяных скважинах.





